EdNum : Thymio, Scratch, VPL
Descriptif
Cette séquence en trois parties va permettre aux élèves de savoir qu’un robot peut interagir avec son environnement notamment grâce à la présence de capteurs qui lui permettent de le percevoir. De plus, elles·ils vont apprendre qu’en utilisant un langage de programmation, le robot peut effectuer des actions. La manipulation de l’objet tangible, la démarche d’investigation, le travail en équipe, la richesse des interactions sociales, la place importante de la langue orale et écrite, la découverte d’un langage de programmation, le statut de l’erreur et la créativité sont au coeur de cette séquence.
Cycle
Cycle 2, 7-8 année
Discipline(s) d'enseignement
- Mathématiques
- Education numérique
Référence(s) au PER
-
Progressions des apprentissages PER EdNum
- - SCIENCE INFORMATIQUE -
- INFORMATIQUE ET SOCIÉTÉ
- Réflexion sur la place de l'informatique dans la société
- ALGORITHMES ET PROGRAMMATION
- Création et comparaison de programmes avec des séquences, des tests conditionnels et des boucles à l'aide d'un langage de programmation visuel pour résoudre des problèmes simples
- Découverte et création de sous-programmes pour améliorer un programme
- Utilisation de paramètres pour modifier un programme
- MACHINES, SYSTÈMES, RÉSEAUX
- Identification des composants principaux (processeur, mémoire, dispositifs d'entrée/sortie, …) de différents types de machines (ordinateur, tablette, robot,…) et de leurs fonctions
Références au(x) moyen(s) d'enseignement

Déroulement
| Organisation | Déroulement / Etapes | Moyens |
|---|---|---|
| Libre | Séance 1 : Découverte de ThymioLes élèves découvrent et manipulent le robot Thymio. Elles·ils observent et verbalisent les différents comportements adoptés selon le pré-programme choisi, identifient les algorithmes en présence et développent ainsi leur pensée informatique. Les élèves définissent ce qui caractérise un robot et découvrent ses composantes. Cette séance est largement inspirée du "Scénario 3 · SI · 3e-4e · Robotique" édité par la Direction générale de l’enseignement obligatoire et de la pédagogie spécialisée (DGEO). La ressource étant prévue dans le canton de Vaud pour des élèves de 3H-4H, les durées mentionnées doivent être adaptées au contexte de la classe. |
|
| HC | Préparation de la Séance 2 : Thymio et ScratchLes ressources ci-dessous sont extraites du livre Thymio et Scratch.
1. Installation et démarrage de Thymio Suite. Ce logiciel à installer sur chaque ordinateur permet de réaliser le programme avec Scratch et de le transmettre par connexion sans fil au Thymio. 2. Découverte de la terminologie principale sur la programmation 3. Présentation des blocs Thymio Scratch
Les activités proposées dans Thymio et Scratch sont relativement complexes et peuvent être proposées en prolongement de la séquence. |
1. Installation et démarrage de Thymio Suite 2. Découverte de la terminologie principale sur la programmation 3. Présentation des blocs Thymio Scratch
|
| Libre | Séance 2 : Thymio et ScratchLes élèves programment le Thymio à l'aide du langage découvert en 5H-6H ("La tortue 1", "La tortue 2", "Damier", "Pour aller de A à B", "Pour sortir du labyrinthe"). Les activités sont conçues pour développer pas à pas la pensée informatique, en apprenant à penser logiquement comme le ferait un développeur de logiciels.
1. Informatique débranchée Les élèves travaillent à l'aide des séquences 5E, 5F et 5G de "Connected 1".
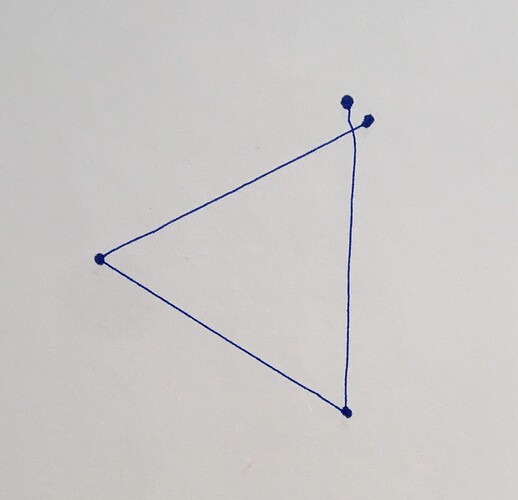
2. Informatique branchée - 2 ateliers en parallèle -- Atelier 1 (avec Thymio) -- - Les élèves programment le Thymio à l'aide de Scratch pour reproduire les figures géométriques proposées dans l'activité Msn 7H E - L 5 Constructions à partir de croquis ou Msn 8H E - L 8 Croquis de quadrilatères (placer un feutre dans le trou au centre du Thymio). - Après observation, déduction ou investigation, les élèves constatent que les deux blocs à utiliser sont : "avancer de ..." (la variable est exprimée en millimètres) et "tourner de ..." (la variable est exprimée en degrés).
⚠️ ⚠️ ⚠️ Remarque importante ⚠️ ⚠️ ⚠️ Cette activité est une excellente exemplification de l'intégration de la programmation et de la modélisation au service d'une activité disciplinaire du programme. Cependant, Thymio étant plus conçu pour des activités exploratoires basées sur les différents capteurs que pour des dessins de précision, il est tout à fait prévisible que la figure géométrique soit imprécise.
Il est toutefois possible d'améliorer la précision en variant la vitesse lors de la rotation. Dans le programme, le bloc
-- Atelier 2 (sans Thymio) -- - Les élèves programment à l'aide de Scratch en ligne (pour reproduire les figures géométriques proposées dans l'activité Msn 7H E - L 5 Constructions à partir de croquis ou Msn 8H E - L 8 Croquis de quadrilatères. - Lien vers l'activité en ligne : https://scratch.mit.edu/projects/1283935915/editor/ - Après observation, déduction ou investigation, les élèves constatent que les deux blocs à utiliser sont : "avancer de ..." (les millimètres peuvent être exprimés en "pas") et "tourner de ...".
Les élèves comparent leur travail et échangent sur le(s) programme(s) réalisé(s) :
|
Séquences 5E, 5F et 5G de "Connected 1".
Solutions 7H L 5 Constructions à partir de croquis Solutions 8H L 8 Croquis de quadrilatères
|
| Libre | Séance 3 : Thymio VPL, les missionsCette séance tirée de DÉ>CODAGE a pour objectif de permettre aux élèves de créer et d’utiliser des algorithmes pour un robot, ainsi que de leur faire écrire des programmes informatiques dans un nouvel environnement de programmation visuel simple (langage VPL). Ce scénario vise également le travail des cinq compétences transversales du PER : la collaboration, la communication, les stratégies d’apprentissage, la pensée créatrice et la démarche réflexive. Un soin particulier est apporté à l’explicitation aux élèves de ce qui est travaillé lors de chaque mission, afin de donner du sens aux apprentissages.
Remarques :Mission 2 - pensée créatrice Les sons produits par le Thymio, pré-programmés dans le langage VPL, ne correspondent pas aux notes de la gamme, ce qui pourrait limiter la créativité des élèves mélomanes. Le langage Scratch (cf séance 2) permet de programmer des notes "exactes" :
|
|
| L | ProlongementsDe nombreuses ressources proposent des défis à réaliser avec le Thymio :
|
 peut être remplacé par le bloc
peut être remplacé par le bloc  . La variable à indiquer pour la vitesse dépend d'un Thymio à l'autre (entre 50 et 100) : les élèves pourront faire plusieurs tests pour trouver la vitesse amenant à une précision satisfaisante.
. La variable à indiquer pour la vitesse dépend d'un Thymio à l'autre (entre 50 et 100) : les élèves pourront faire plusieurs tests pour trouver la vitesse amenant à une précision satisfaisante.Organisation : C = toute la classe G = groupe E = travail individuel DC = demi-classe L = libre HC = hors-classe